


CDW-3000S-MO激光(guāng)平面幹涉儀是一款新型的(de)非接觸高(gāo)精度無損光(guāng)學表面測量設備。它基于菲索幹涉原理(lǐ),通(tōng)過分(fēn)析幹涉條紋來(lái)确定光(guāng)學表面面形。該設備集成了(le)先進的(de)光(guāng)學、機械和(hé)電子技術,具有不損傷被測物(wù)品、測量精度高(gāo)、測量時(shí)間短的(de)特點;實現了(le)對(duì)準光(guāng)路和(hé)成像光(guāng)路的(de)電子切換,方便了(le)用(yòng)戶的(de)使用(yòng)。 CDW-3000S-MO适用(yòng)于車間加工過程的(de)在線檢測和(hé)大(dà)型的(de)高(gāo)精度器件檢測。
建議(yì)檢測精度爲整體精度≤5um的(de)大(dà)型平面。
CDW-3000S-MO主要技術指标
|
技術指标 |
參數值 |
|
測量原理(lǐ) |
菲索幹涉原理(lǐ) |
|
顯示方式 |
CCD顯示 |
|
标準參照(zhào)鏡面形精度 |
P-V:λ/10 |
|
光(guāng)源 |
He-Ne激光(guāng)器 |
|
波長(cháng) |
632.8nm |
|
标準測量口徑 |
Ф300mm |
|
測量行程 |
1000×2000 (可(kě)以訂做(zuò)其他(tā)尺寸) |
|
電源 |
AC210~230V 50~60Hz |
|
最佳工作溫度 |
20~25℃ |
|
外形尺寸 |
1200×2000×1800 |
|
質量 |
約700kg |
配置清單
|
序号 |
型号、規格、名稱 |
數量 |
|
1 |
CDW-3000S-MO激光(guāng)平面幹涉儀主機 |
1台 |
|
2 |
氦氖激光(guāng)電源 |
1套 |
|
3 |
高(gāo)精度機械調節架 |
1套 |
|
4 |
标準光(guāng)學工作平台 |
1台 |
|
5 |
标準Ф300mm光(guāng)學平面樣闆 |
1套 |
|
6 |
電腦(nǎo)工作台 |
1套 |
|
7 |
DELL計算(suàn)機 |
1台 |
|
8 |
14″液晶顯示屏 |
2台 |
|
9 |
打印機 |
1台 |
一 主要數據
第一标準平面(A面),不鍍膜。工作直徑:D1=φ285mm 不平度小于0.05um![]()
2.第二标準平面(B面),不鍍膜。工作直徑:D2=φ285mm 不平度小于0.08um![]()
3.準直系統:孔徑F/2.8,???????? 工作直徑:D0=φ285mm 焦距:f=400mm
4.測微目鏡:焦距f=16.7mm,放大(dà)倍數β=15X,視場(chǎng)角2W=40°, 成像物(wù)鏡:1.D=4.5 II.D=7 III.D=10 F=15 f=23 f=37
5.工作波長(cháng):632.8nm
6.幹涉室尺寸:深400寬500*400mm。
7.光(guāng)源規格:激光(guāng)ZN18(He-Ne)。
8.儀器的(de)外形尺寸:長(cháng)*寬*高(gāo) 500*600*1200mm
9.儀器重量:150公斤
圖一 第一标準平面(A面)精度照(zhào)片 
圖二 第二标準平面(B面)
二,工作原理(lǐ)
本儀器工作基于雙光(guāng)束等厚幹涉原理(lǐ)。
根據近代光(guāng)學的(de)研究結果,光(guāng)兼有波動與顆粒兩重特性。光(guāng)的(de)幹涉現象是光(guāng)的(de)波動性的(de)特性。因此,
介紹本節内容時(shí),僅在光(guāng)的(de)波動性的(de)範圍内討(tǎo)論,例如,把“光(guāng)”稱爲“光(guāng)波”,“平行光(guāng)”稱爲
“平面光(guāng)”。 波長(cháng)爲![]() 的(de)單色光(guāng)經過儀器有關的(de)光(guāng)學系統後成爲平面波M。(如圖三所示),經儀
的(de)單色光(guāng)經過儀器有關的(de)光(guāng)學系統後成爲平面波M。(如圖三所示),經儀
器的(de)标準平面P1和(hé)被檢系統P2反射爲平面波M1和(hé) M2。M1、M2即爲兩相幹光(guāng)波,重疊後即産生等
厚幹涉條紋。 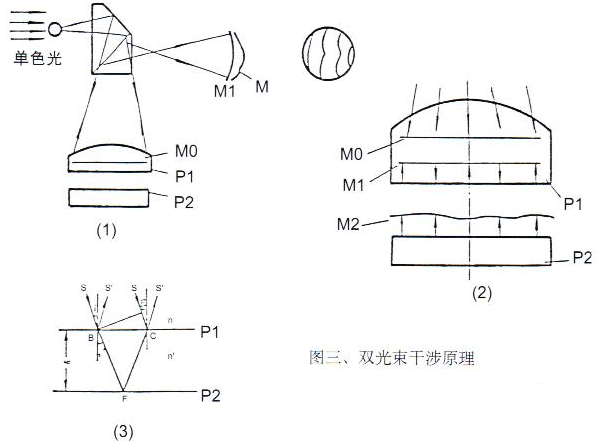
等厚幹涉原理(lǐ)
能夠産生幹涉的(de)光(guāng)束,叫相幹光(guāng)。相幹光(guāng)必須滿足三個(gè)條件:1.震動方向必須一緻,2.頻(pín)率相等:
3.光(guāng)束必須相遇,且在相遇點處的(de)相位差在整個(gè)時(shí)間内爲一常量。如圖三(3)基準面P1,被測
面爲P2.當平行光(guāng)束是S-S射到基準面P1上時(shí),其中一部分(fēn)反射爲S′-S′,
另一部分(fēn)折射爲B-F,進入基準面和(hé)被測面之間的(de)空氣層内,經被測零件的(de)上表面P1反射之後
,沿方向S′-S′射出。 兩束光(guāng)在C點處相遇,其光(guāng)程差![]() 爲:
爲:![]() =(BF+FC)n′-EC.n
=(BF+FC)n′-EC.n
(1) 式中n′和(hé)n——分(fēn)别表示玻璃和(hé)空氣的(de)折射率。由圖三(3)可(kě)得(de):BF=FC=![]()
(2)式中 h——空氣層的(de)厚度;i和(hé)i′——分(fēn)别爲入射角和(hé)折射角由△BEC和(hé)△BCF可(kě)行EC=BCsini
(3) BC=2h tgi′(4) 将公式
(4)代入(3)後,再和(hé)(2)一起代入(1)得(de): 因爲n sin i=n′sin i′,所以![]() 空氣的(de)折射率n=1,故
空氣的(de)折射率n=1,故 ![]() =2 h cos? i′ 由于光(guāng)線在被測零的(de)表面上反射,其位相将發生
=2 h cos? i′ 由于光(guāng)線在被測零的(de)表面上反射,其位相将發生![]() /2的(de)突變,故光(guāng)程差
/2的(de)突變,故光(guāng)程差![]() 應該用(yòng)下(xià)式來(lái)表示:
應該用(yòng)下(xià)式來(lái)表示: ![]()
(5) 爲了(le)討(tǎo)論方便起見,将公式(5)寫成如下(xià)的(de)形式: ![]() 當式中的(de)m爲整數時(shí),m即爲幹涉級數。由于這(zhè)時(shí)相幹光(guāng)的(de)初始相位差φ=0,所以m即爲幹涉條紋的(de)條紋數,亦即通(tōng)常所說的(de)光(guāng)圈數。
當式中的(de)m爲整數時(shí),m即爲幹涉級數。由于這(zhè)時(shí)相幹光(guāng)的(de)初始相位差φ=0,所以m即爲幹涉條紋的(de)條紋數,亦即通(tōng)常所說的(de)光(guāng)圈數。
由公式(5)可(kě)以看出:光(guāng)程差![]() 的(de)大(dà)小僅僅與空氣層的(de)厚度和(hé)光(guāng)線的(de)折射角有關。相幹光(guāng)束
的(de)大(dà)小僅僅與空氣層的(de)厚度和(hé)光(guāng)線的(de)折射角有關。相幹光(guāng)束
以相同的(de)傾角射入空氣層,由于空氣厚度的(de)變化(huà),所呈現的(de)亮暗相間的(de)幹涉條紋是對(duì)空氣層
上等厚度點的(de)軌迹,這(zhè)類幹涉就稱爲等厚幹涉。
見圖三(2)由于儀器的(de)标準平面P1具有很高(gāo)的(de)精度,因此可(kě)以認爲:經P1反射後的(de)波面M1
與M0完全相同。
假使被檢系統P2沒有誤差,因此也(yě)可(kě)以認爲:經P2反射後的(de)波面M2與M0完全相同,即與M1完
全相同。
如果M1、M2之間存在楔角![]() ,則兩波面疊加相幹時(shí),得(de)到平行的(de)、直線的(de)、等間距的(de)一系列幹
,則兩波面疊加相幹時(shí),得(de)到平行的(de)、直線的(de)、等間距的(de)一系列幹
涉條紋,相鄰兩條紋的(de)間隔——即條紋寬度B由下(xià)決定:
B=?? (![]() 以弧線計)…………………
以弧線計)…………………
(6) 式? B=![]() ? (
? (![]() 以秒計算(suàn))………
以秒計算(suàn))………
(7) 當B![]() =632.8nm時(shí)(He-Ne激光(guāng)輸出波長(cháng))時(shí), B=130.528/
=632.8nm時(shí)(He-Ne激光(guāng)輸出波長(cháng))時(shí), B=130.528/![]() (mm) (8) 由(6)(7)(8)式可(kě)知:
(mm) (8) 由(6)(7)(8)式可(kě)知:
愈大(dà),B愈小,條紋愈密,窄(圖四a)
愈小,B愈大(dà),條紋愈疏,寬(圖四b)
=0,B=![]() ,幹涉場(chǎng)爲一片顔色(圖四c)
,幹涉場(chǎng)爲一片顔色(圖四c)
如果被檢系統P2存在缺陷,則反射波面M2将産生對(duì)M1的(de)某些偏離,此時(shí)将産生與下(xià)述不同的(de)幹涉條紋。 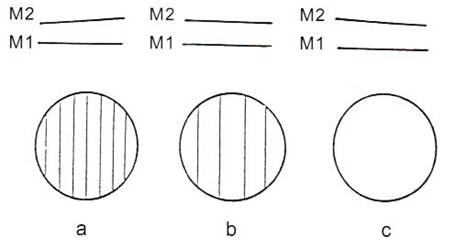
圖四
如M2是一半徑很大(dà)的(de)球面波,則可(kě)能得(de)到圓弧的(de)幹涉條紋(圖五a)。
如M2是一半徑不是很大(dà)的(de)球面波,則可(kě)能得(de)到一系列圓環形的(de)幹涉條紋(圖五b)
如M2是柱面的(de)波形,則可(kě)能那個(gè)得(de)到一系列直線的(de)平行的(de),但間距不等的(de)幹涉條紋也(yě)可(kě)能得(de)到
彎曲的(de),但不是圓弧狀的(de)幹涉條紋(圖六a)
如果M2是一個(gè)不規則的(de)波面,則得(de)到相應不規則的(de)幹涉條紋(圖六a)
因此,我們得(de)到的(de)幹涉圖正确地表現力經被檢系統反射形成的(de)波面的(de)全部誤差信息,對(duì)這(zhè)些
條紋進行正确地解釋或計算(suàn),可(kě)以測得(de)被檢系統的(de)誤差。
對(duì)于被檢平面,常用(yòng)N、△N來(lái)表示其平面性精度。 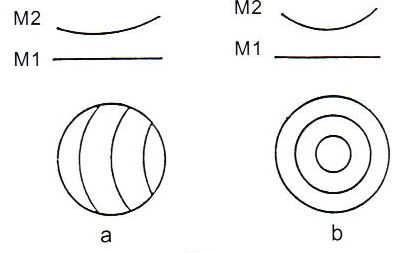
圖五 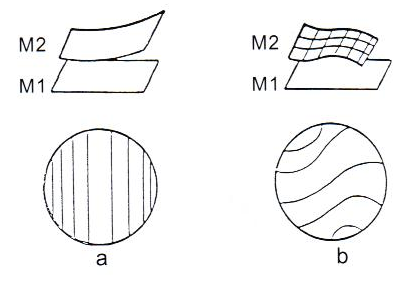
圖六
使用(yòng)中的(de)幾點說明(míng)
3-1防震
我公司生産的(de)激光(guāng)平面幹涉儀在設計時(shí),對(duì)儀器結構本身的(de)防震作過一定的(de)考慮,因此一般隻要
在工作台上放一塊10毫米厚度的(de)橡皮或毛氈即可(kě),工作場(chǎng)地的(de)地面應結實牢固,不允許有人(rén)走動
時(shí)能感覺到的(de)震動。儀器如放在木(mù)制工作台時(shí),因儀器本身有100公斤,爲使工作台變形引起震
動,因此儀器需放在腳比較結實的(de)一邊,這(zhè)樣就能減少晃動。
3-2幹涉條紋數的(de)确定和(hé)方向 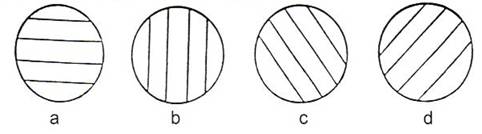
??? 在幹涉測量時(shí),對(duì)于幹涉條紋數目選擇多(duō)少影(yǐng)響到工件本身的(de)測量誤差。幹涉條紋數目
太少(疏)反映不了(le)整個(gè)面形的(de)誤差,幹涉條紋數目太多(duō)(密),幹涉條紋失高(gāo)的(de)測量誤差也(yě)
很難計算(suàn)。根據國家标準,使被檢區(qū)域内出現3-5幹涉條紋,這(zhè)樣誤差就能容易判斷。如果對(duì)高(gāo)
精度平面的(de)測量,最好以米字形四個(gè)方向對(duì)幹涉條紋進行觀察,這(zhè)樣就更能客觀地反映被檢工
件整個(gè)的(de)面形誤差。如圖七所示。 圖七 觀察、照(zhào)相幹涉條紋四個(gè)方向
3-3幹涉條紋的(de)正負判斷
區(qū)分(fēn)被檢工件平面度的(de)正負即高(gāo)(凸)低(凹)圈的(de)方法很多(duō)。以本儀器而已,從使用(yòng)方便角
度來(lái)看,首先用(yòng)手指輕輕托托被檢工件的(de)下(xià)方,看幹涉條紋的(de)移動方向,然後把門關上,在用(yòng)
肉眼觀察的(de),同時(shí)用(yòng)兩手輕輕從上至下(xià)按動儀器中的(de)微動手輪,看是否與托被檢工作台一緻
(一般都是一緻的(de)),此時(shí)從視場(chǎng)中就能很容易地看到條紋在按動中向某一個(gè)方向移動,根
據我公司儀器情況,如果按下(xià)去條紋凸的(de)方向向外擴散(如圖八),我們就認爲工件面形爲高(gāo)
光(guāng)圈(凸面),如果條紋方向按下(xià)去收縮,我們就認爲低光(guāng)圈(凹圈)。若按動微動手輪和(hé)輕
托工作台不一緻,就按輕托工作台爲準,用(yòng)這(zhè)個(gè)方法在檢測中比較簡單,使用(yòng)起來(lái)也(yě)極爲方便。 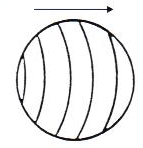
圖八? 幹涉條紋判别
3-4影(yǐng)響條紋清晰度的(de)幾種原因
影(yǐng)響條紋清晰度的(de)原因很多(duō),我們在使用(yòng)過程中大(dà)緻有以下(xià)幾種情況:
激光(guāng)光(guāng)束與小球關系
在使用(yòng)中,激光(guāng)光(guāng)束是否很均勻地照(zhào)射在φ2mm的(de)小球上(G1),如果有偏離,使幹涉場(chǎng)強不均勻,
這(zhè)樣觀察到的(de)條紋就有粗細,容易造成條紋精度的(de)判别錯誤,因此在使用(yòng)前,調節光(guāng)束是必須的(de)。
激光(guāng)管老化(huà): 激光(guāng)管在使用(yòng)一段時(shí)間後,光(guāng)亮度會減弱,同時(shí)會出現忽亮忽暗現象,此
時(shí)看到的(de)條紋也(yě)是不清晰的(de),換一根管子即能排除。
被檢工件面和(hé)主鏡與小球的(de)不清潔:、
如被檢工作面沒有擦清或主鏡有手印時(shí)間長(cháng)了(le)出現黴斑以及小球占上灰塵都能影(yǐng)響幹涉條紋的(de)
清晰度,因此,在檢定前清洗各光(guāng)學件是必須的(de)。
被檢工件和(hé)主鏡的(de)高(gāo)度:
在檢測時(shí),被檢工件最好靠近主鏡,這(zhè)是由于不可(kě)避免的(de)模式競争,使激光(guāng)管的(de)單色性更差,
從而使幹涉條紋模糊,在工作中我們發現越靠近主鏡(當然不要碰到主鏡),它的(de)條紋越清晰。
|
l像差分(fēn)析、MTF(光(guāng)學傳遞數)、PSD(功率譜密度)、PSF(點擴散函數)、波前梯度等 |



 手機:13818629801
手機:13818629801 郵箱:sales@sh-opt.com
郵箱:sales@sh-opt.com 地址:上海市嘉定區(qū)金沙江西路1555弄8号樓2樓
地址:上海市嘉定區(qū)金沙江西路1555弄8号樓2樓